


工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室(李工:13062761152)
ABB机器人的通讯方式主要有四种:(1)普通IO (2)总线 (3)网络 (4)其他confidential。
当使用总线通讯的Profinet如何定时中断向PLC发送当前机器人位置呢?
1)PLC 想实时获取机器人每个轴位置
2)可以使用pcsdk,pc直接读取
3)或者通过机器人multitask,即多任务,在机器人后台创建新任务,实时发数据
4)如果机器人没有以上选项,可以通过定时中断itimer来发送组输出
5)此处举例使用Profinet(机器人做从站),发送组输出
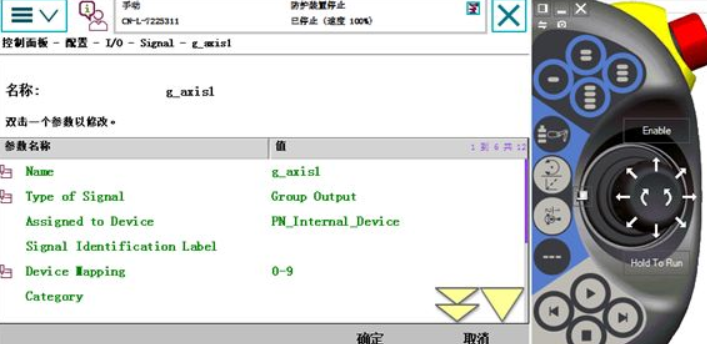
6)创建组输出g_axis1,如下。机器人通常各轴范围在±360内,又由于组输出只能发送正整数,故在发送时,所有数据放大500(即+500,plc收到后减去500即可)。0-1000,需要10位,所以创建组输出时选择10位。
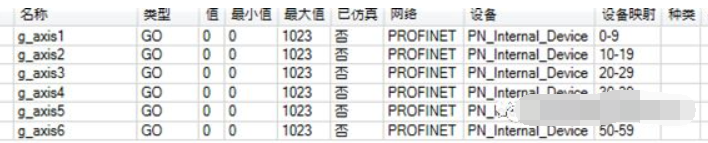
7)同理创建g_axis2到g_axis6
8)创建程序如下:
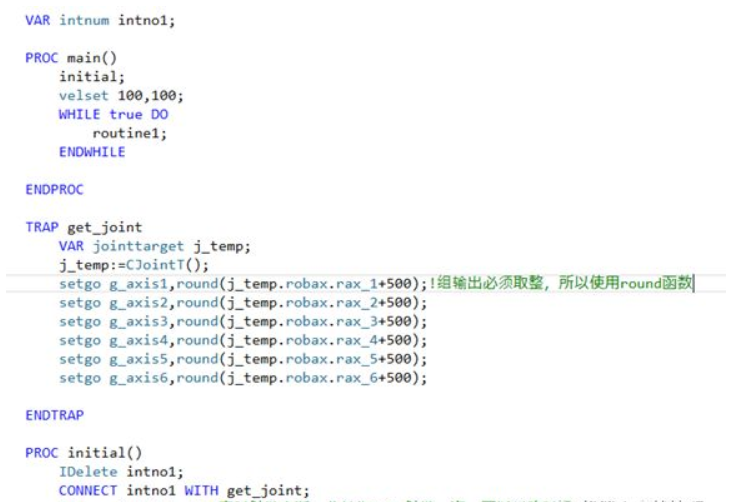
9)程序运行起来后,就可以看到对应组输出变化。
10)也可使用ptmp:=crobt()函数读取当前的xyz值,并将对应xyz通过组输出发送。
以上内容来源于:网络
侵权删

