


1ЁЂЪзЯШЫЕЯТABBЛњЦїШЫПижЦЦїШчКЮе§ШЗЙиЛњЁЃдкЪОНЬЦїжїНчУцевЕНжиаТЦєЖЏетвЛЯюЁЃШчЯТ

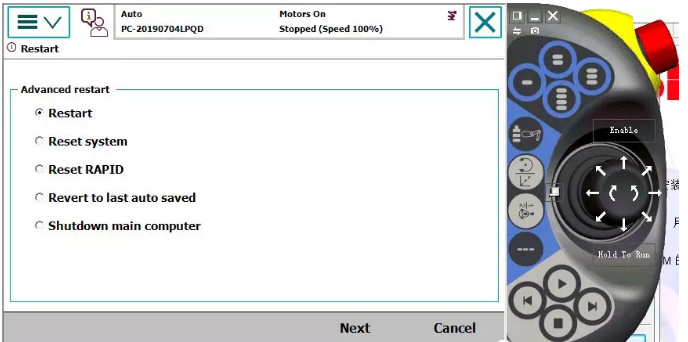
ШЛКѓбЁдёИпМЖетИібЁЯюЃЈШчЯТЭМЃЉЃЌзМБИЃЈShutdownЃЉЙиЛњЁЃ

ЕуЛїЯТвЛВНЯдЪОГіЙиЛњМЦЫуЛњбЁЯюЃЌШЛКѓЕуЛїЙиБежїМЦЫуЛњ


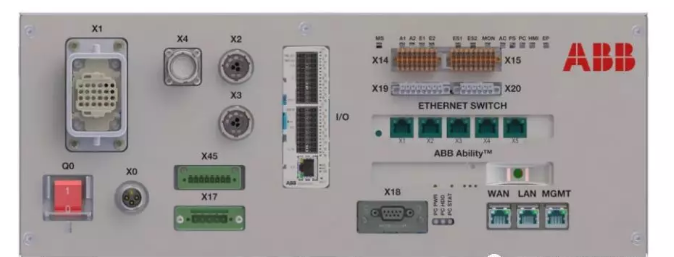
ШЛКѓЕШД§ЃЌжБЕНЪОНЬЦїНчУцЯдЪОЕНЪОНЬЦївЛжБЪдЭМСЌНгPCжїЛњЕФЛУцМДПЩЙиБеЭтВПжїЛњЕчдДЁЃетИіЛУцдкЗТецШэМўжаВЛЛсЯдЪОЃЌдкЪЕМЪЕБжаЛсЯдЪОЯЕЭГвбОЙиБеЕФгЂЮФгяОфЃЌШЛКѓЙиЛњЭтВППижЦЦїЪЕМЪЕФЕчдДПЊЙиЃЌШчЯТЭМЃЈOmniCoreTM Small Robot ControllerЃЉ
ЕБЯТгУЕФБШНЯЖрЪЧIRC5(IRCЪЧ Industrial Robot ControllerЕФЫѕаДЃЌ5ДњБэЕкМИДњЃЉЕкЮхДњЛњЕФШчЯТЭМЃЈВЛЭЌРраЭПижЦЙёЦЅХфВЛЭЌИКдиЕФЛњаЕБлЃЌЧјБ№жївЊдкгкЕчдДШнСПгыЧ§ЖЏЙІТЪЩЯЕФВювьЃЌИКдидНДѓЕФЙІТЪашЧѓвВдНДѓЁЃЃЉЛиЕНе§ЬтЃЌвдЯТЪЧИїРраЭПижЦЙёЕчдДПЊЙиЁЃдкЙиЛњКѓАбЕчдДПЊЙиИДЮЛЁЃ

БИзЂЃКПЊЛњдке§ШЗЕФЕчбЙЗЖЮЇЯТЃЌЯпРТЃЈжїЕчдДЕчРТЃЌБОЬхЯпРТЃЌаХКХЯпРТЃЉСЌНге§ШЗКѓЃЌДђПЊДЫЕчдДПЊЙиМДПЩЁЃ
2ЁЂW-start (warm restart)ЃЈДЫЯюжївЊдк5АцБОЯЕЭГЯдЪОЃЌ6АцБОЯЕЭГИќаТКѓНјааСЫжиЖЈвхЃЌЕЋЙІФмЛЙЪЧЛљБОвЛжТЃЉ
ЯТУцетРяжївЊЪЧЙигкwarm restartШШЦєЖЏЯЕЭГЃЌВЛаоИФШЮКЮВЮЪ§ЕФЦєЖЏЗНЪНЁЃ
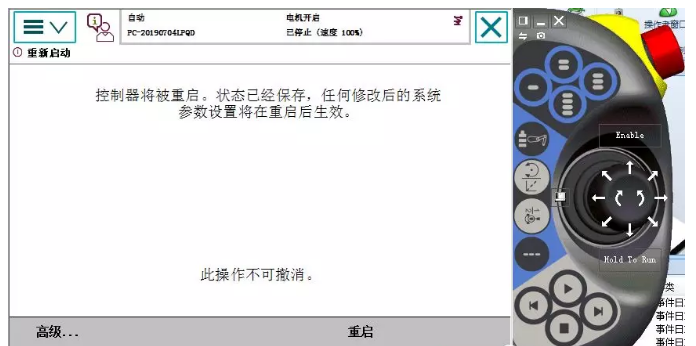
АДЯТШШЦєЖЏАДХЅКѓЕБЧАЯЕЭГЙвЦ№ЃЌСЂМДЛиНјаажиЦєЖЏзїЁЃЭЈЙ§ШШжиЦєжиаТИДЮЛЯЕЭГХфжУВЮЪ§ЁЃ
3ЁЂПДЯТ5.КЭ6.АцБОЕФЦєЖЏЗНЪННчУцЧјБ№ЃЈ6АцБОЩ§МЖКѓНјаажиЖЈвхЃЌЕЋЙІФмЛЙЪЧЛљБОвЛжТЃЉ
Йигк5АцБОШчЯТ
Йигк6АцБОШчЯТ
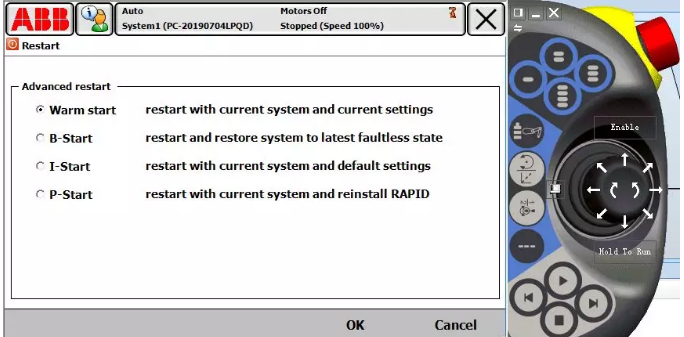
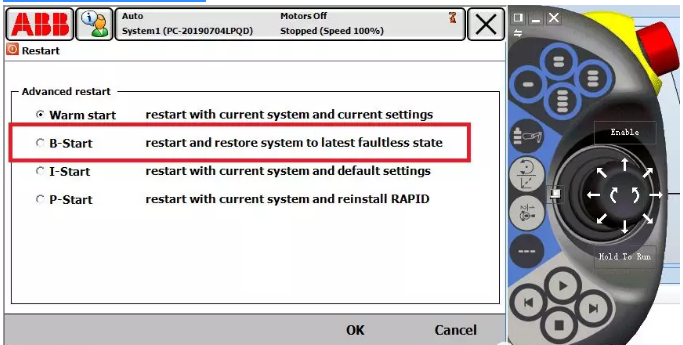
4ЁЂB-start
гЩгкЙиЛњЪБЮоЗЈе§ШЗБЃДцimageЮФМў,ЖјЕМжТЯЕЭГДІгкЯЕЭГЪЇАмзДЬЌ, B-startПЩвдШУЯЕЭГвд*НќвЛДЮГЩЙІЙиЛњЪББЃСєЕФЯЕЭГЪ§ОнРДЦєЖЏЯЕЭГЁЃ
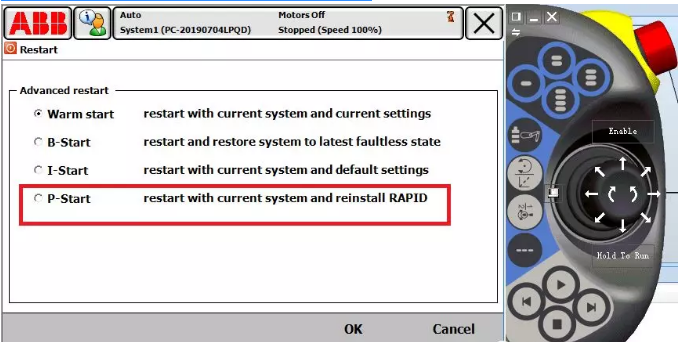
5ЁЂP-start : жиЦєЛђЩОГ§ГЬађКЭФЃПщ
P-startПЩвдШУЯЕЭГЕУвдЛжИД,ЕЋЪЧЪжЖЏзАдиЕФГЬађКЭФЃПщГ§Эт,ЫљгаЕФstaticКЭsemistaticШЮЮёЖМНЋДгЭЗПЊЪМжДаа,ЫљгаЕФФЃПщЖМНЋАДЯЕЭГХфжУДгаТзАди,ЯЕЭГВЮЪ§ВЛБфЁЃ
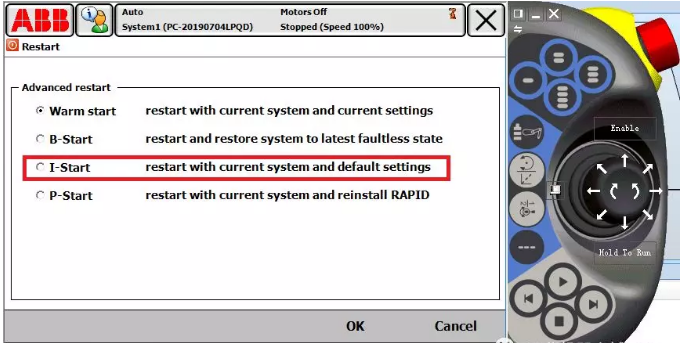
6ЁЂI-start : жиЦєЯЕЭГВЂЗЕЛиЕНФЌШЯзДЬЌ
I-startжЎКѓ,ЯЕЭГНЋЛжИДЕНИеИезАКУЯЕЭГЪБЕФФЌШЯзДЬЌ, ЖдЯЕЭГВЮЪ§ЛђЦфЫћЩшжУЫљзіЕФШЮКЮаоИФЖМНЋЖЊЪЇЁЃ
7ЁЂЙигкX-start : жиЦєВЂбЁдёСэЭтвЛИіЯЕЭГ
ЫљгаГЬађМАЯЕЭГВЮЪ§ПЩвдБЃДцЕНimageЮФМў,вдКѓПЩвдЛжИДЃЌвВПЩвдбЁдёЦфЫћЯЕЭГЦєЖЏЃЌВйзїЗНЗЈгыЩЯЭЌРэЃЌетИіЦєЖЏжївЊЪЧРДЧаЛЛЯЕЭГЃЌКЭАВзАЛњЦїШЫЯЕЭГЃЌЭЈЙ§UХЬКЭRSдкЯпОљПЩвдВйзїЁЃ
8ЁЂЙигкC-start : жиЦєВЂЩОГ§ЕБЧАЯЕЭГ
ЯЕЭГЮФМўМаЯТЕФЫљгаФкШнЁЂГЬађКЭБИЗнЖМБЛЩОГ§ЃЌетвтЮЖзХИУЯЕЭГНЋВЛПЩФмБЛЛжИДЃЌашвЊАВзАаТЯЕЭГЃЌВйзїЗНЗЈгыЩЯЭЌРэЁЃЩОГ§ДэЮѓЯЕЭГЃЌКЭЖргрЕФЯЕЭГЃЌвЛЬЈ*ЖрАВзАКЭСНИіЯЕЭГЃЌПеМфгаЯоЁЃ
СЫНтИќЖрABBЛњЦїШЫаХЯЂЃКhttp://www.abbjxs.gbsrobot.com
